AI+CFD:面向空天動力的科學機器學習新方法與新正規化

西北工業大學航天學院副院長秦飛為大家帶來的演講主題是:AI+CFD,面向空天動力的科學機器學習新方法與新正規化。
它主要分為三部分:
-
空天動力背景以及數字化智慧化的趨勢。
-
空天動力全生命週期的數字孿生。
-
結果和展望
WAVE SUMMIT+2021深度學習開發者峰會
【交叉前沿,AI共拓】論壇
空天動力背景
及數字化智慧化的趨勢
新一代資訊科技的發展,推動各行各業向數字化、網路化、智慧化的方向發展,不斷催生全新的技術、業務形態和模式,同時也引起了更為激烈的技術競爭。國家“十四五”智慧製造發展規劃中,“數字孿生”這個詞語被多次引用,“數字孿生”也成為新一輪科技和企業變革的驅動力量。“數字孿生”的概念是指在虛擬空間內真實事物的動態孿生體。藉由感測器,本體的執行狀態以及外部環境資料均可實時對映到孿生體當中。
另一方面,以航天技術發展角度來說,人們對空間資源利用和深空探測的需求越來越強烈,依靠傳統運載火箭進行航天發射已經難以滿足快速進出空間迫切需求。吸氣式重複使用航天運輸系統是全球快速達到,以及廉價、快速、可靠、便捷進出空間的核心技術,是各航空航天大國競相搶佔的技術制高點。
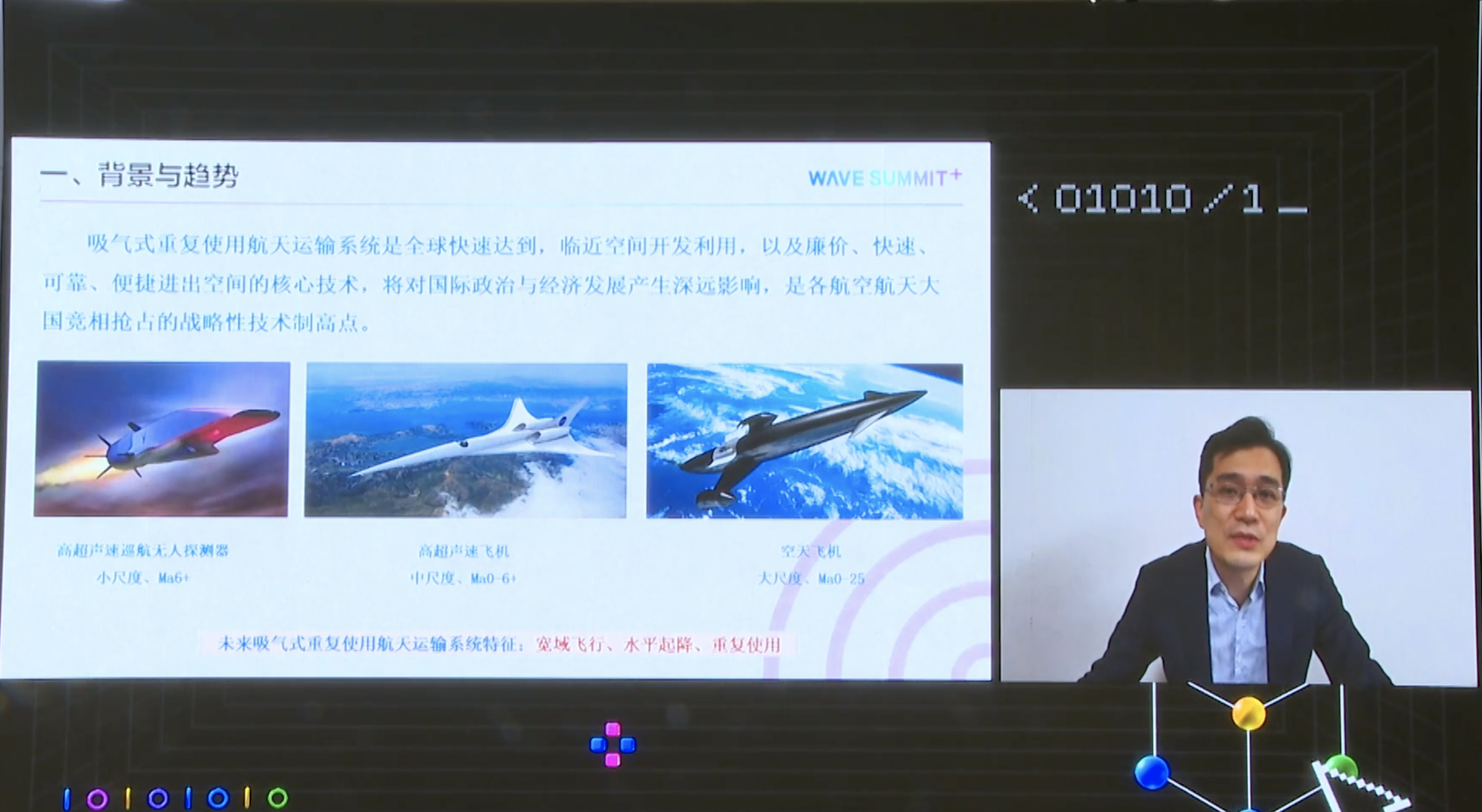
這個技術不但可以作為高超聲速飛機動力,還能夠在普通機場水平起降實現衛星發射,因此,吸氣式重複使用航天運輸系統的動力已經成為快速響應航天運輸最潛在的動力形式之一。同時為了適應未來越發複雜和頻繁的多工需求,航天運輸系統要具備分散式、無人化、彈性化以及智慧化特徵,其核心技術之一是便是“數字孿生”體系建立。
綜上所述,對於下一代基於吸氣式重複使用航天運輸系統,AI技術將極大支撐空天動力數字孿生體系的構建。
空天動力全生命週期的
數字孿生
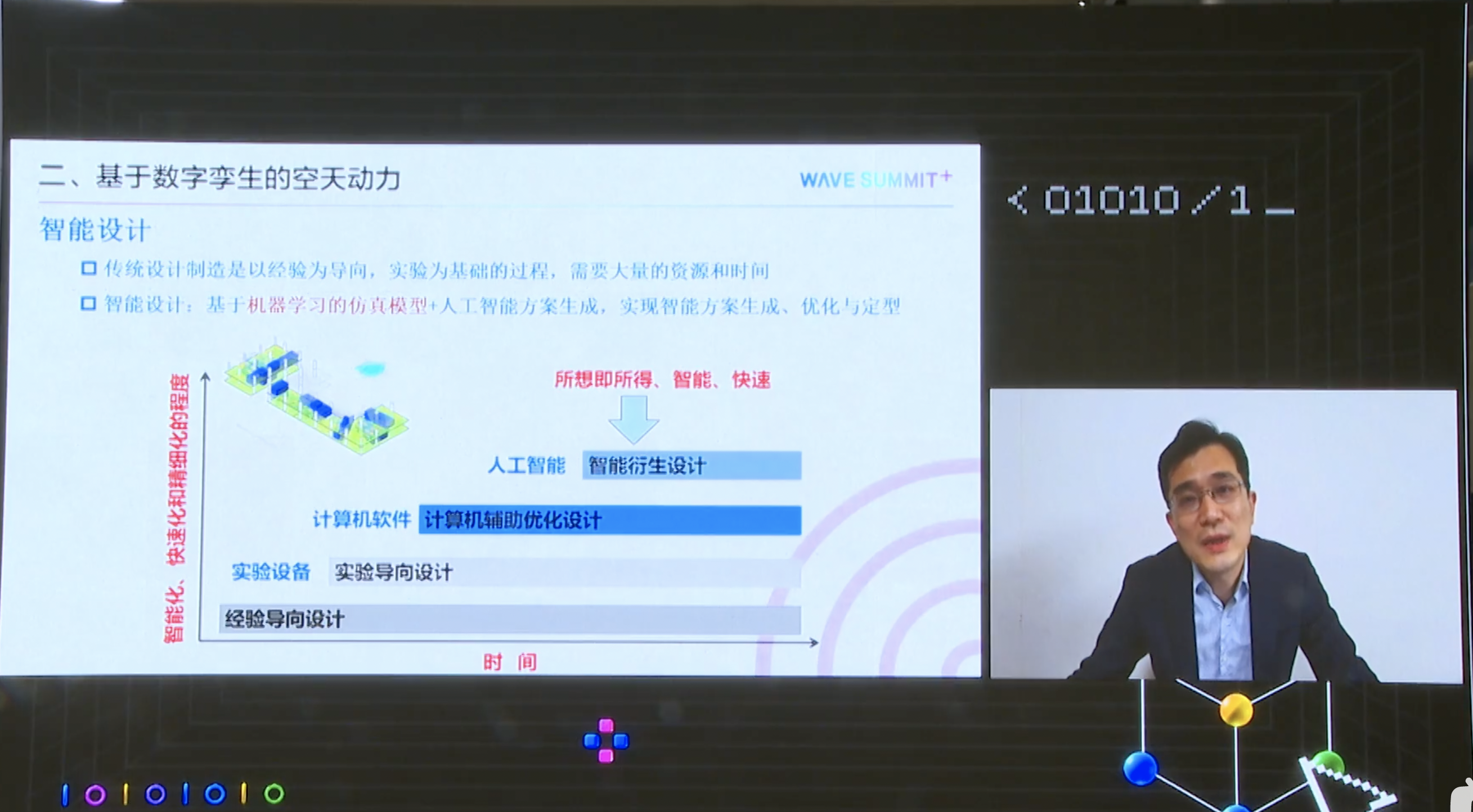
空天動力全生命週期的數字孿生體系主要分為三個大的階段:第一是設計階段,第二是製造階段,第三是服役階段。
智慧設計階段形成基於機器學習的模擬模擬和人工智慧方案生成,實現智慧方案的生成、優化與定型,大大加快了研發的速度;智慧製造階段基於虛擬對映技術,生產過程中的缺陷、公差都可以反映到數字模型當中,為後續服役的壽命監控等提供基礎資料;智慧服役階段基於機器學習的模擬模型,融合虛實對映實現飛行物理狀態、實現飛行狀態的空天對映以及未來狀態智慧監測、智慧風險預測。
通過上面的闡述我們明白了空天動力數字孿生的核心是如何將數字空間與現實空間進行實時連線,並且進行實時預測,實現上述能力的核心有兩個模型:
第一個是虛擬對映模型,通過物理空間感知技術和反演技術,實現實時的物理與數字空間連結;第二個是模擬計算模型,通過高精度、實時的效能計算模型,實現對物理空間的實時預測,最後才能實現智慧化。
因此,模型是支撐數字孿生基石。而現在,模型也不再是單一的物理模型,將基於AI的知識與歷史大資料的融合模型,是知識與資料的結晶。下面針對兩個模型,把我們團隊研究成果進行簡要介紹:
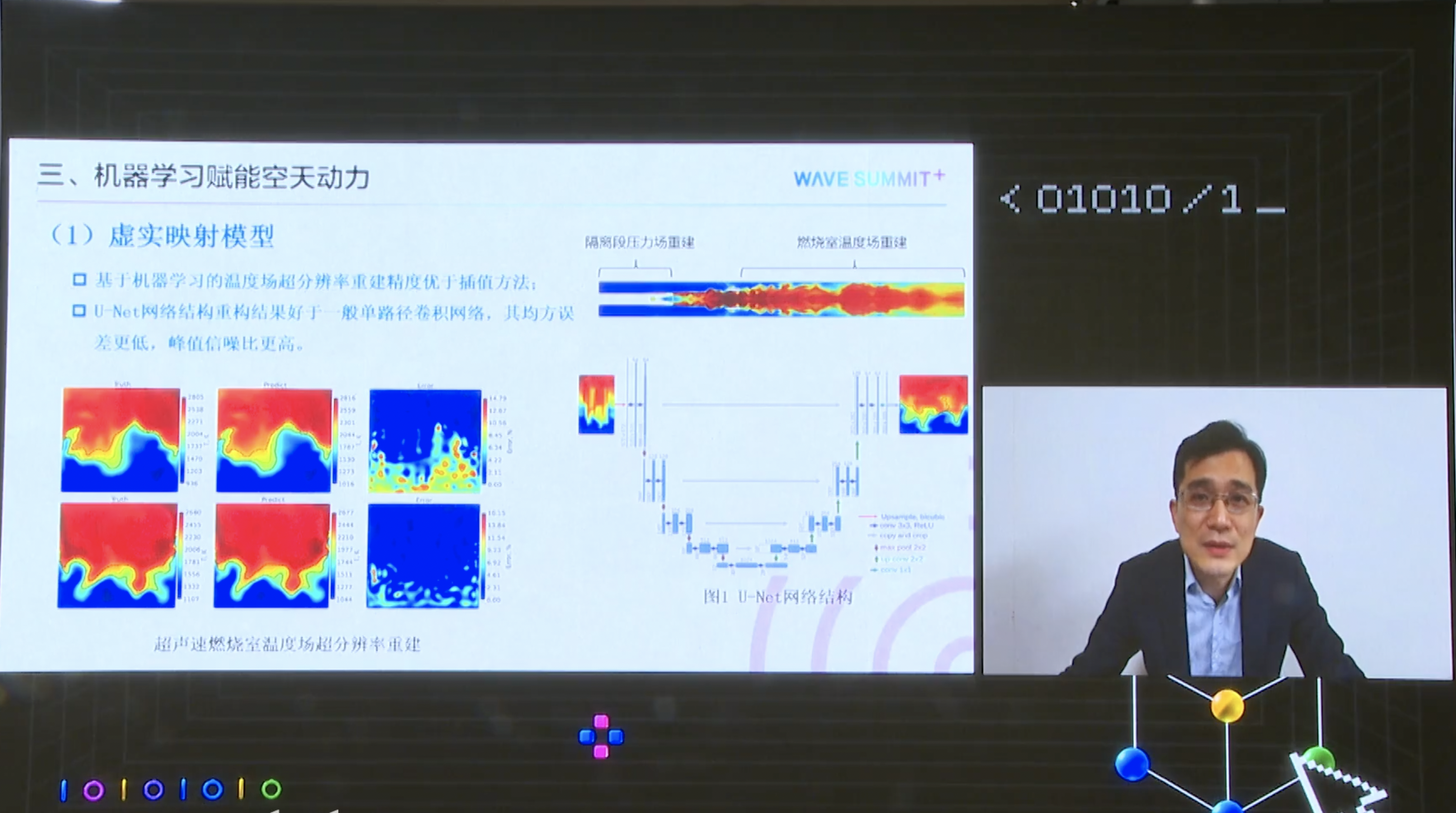
1.虛實對映模型
主要用於發動機製造過程和飛行過程,通過植入發動機電子感測器製造過程當中感知發動機是否存在損傷或者變形以及飛行過程中感知發動機工作狀態一些資訊。對發動機來講,傳統感測器也可以獲得發動機關鍵引數,但這些引數資訊很零散,因此必須採取重構技術,將這些零散的資訊轉為連續的場資訊,構建由物理空間的感測器到虛擬的數字映象,最後對該狀態進行預測。
這裡我們以一個發動機作為例子:實現對發動機資料、流場的重建,通過感測器測量得到溫度場是低解析度,包含大量噪聲資訊的,如何通過Unet深度神經網路重構出高解析度溫度場,通過驗證表明基於機器學習溫度場重構的精度優於一般的插值方法,誤差更低,峰值性噪比更高。
2.智慧模擬模型
當前基於求解物理方程的模擬方法,計算精度與計算效率矛盾突出。比如一個大型發動機的精細化燃燒流場計算,在超算上可能要耗費幾千天,而這樣的計算量對於工程設計是無法接受的。
傳統資料方法通過幾十年發展已經進入了瓶頸,我們需要運用機器學習方法對模擬計算進行加速,機器學習的方法在以前多數用於圖片識別、自動駕駛,那對於這種物理場的求解和上述問題有什麼異同?
首先相同點是數值模擬的可以認為是時間序列的資料集,即有監督學習。但是又有不同點,就是樣本相對幾十萬的大資料來講,樣本量是比較小的。另外,最關鍵的區別在於其有物理背景,預測值需要符合物理規律,比如質量守恆等。鑑於以上特點,我們對機器學習在物理問題中的應用,採用了三個不同的思路,三種思路應用物件也不同。
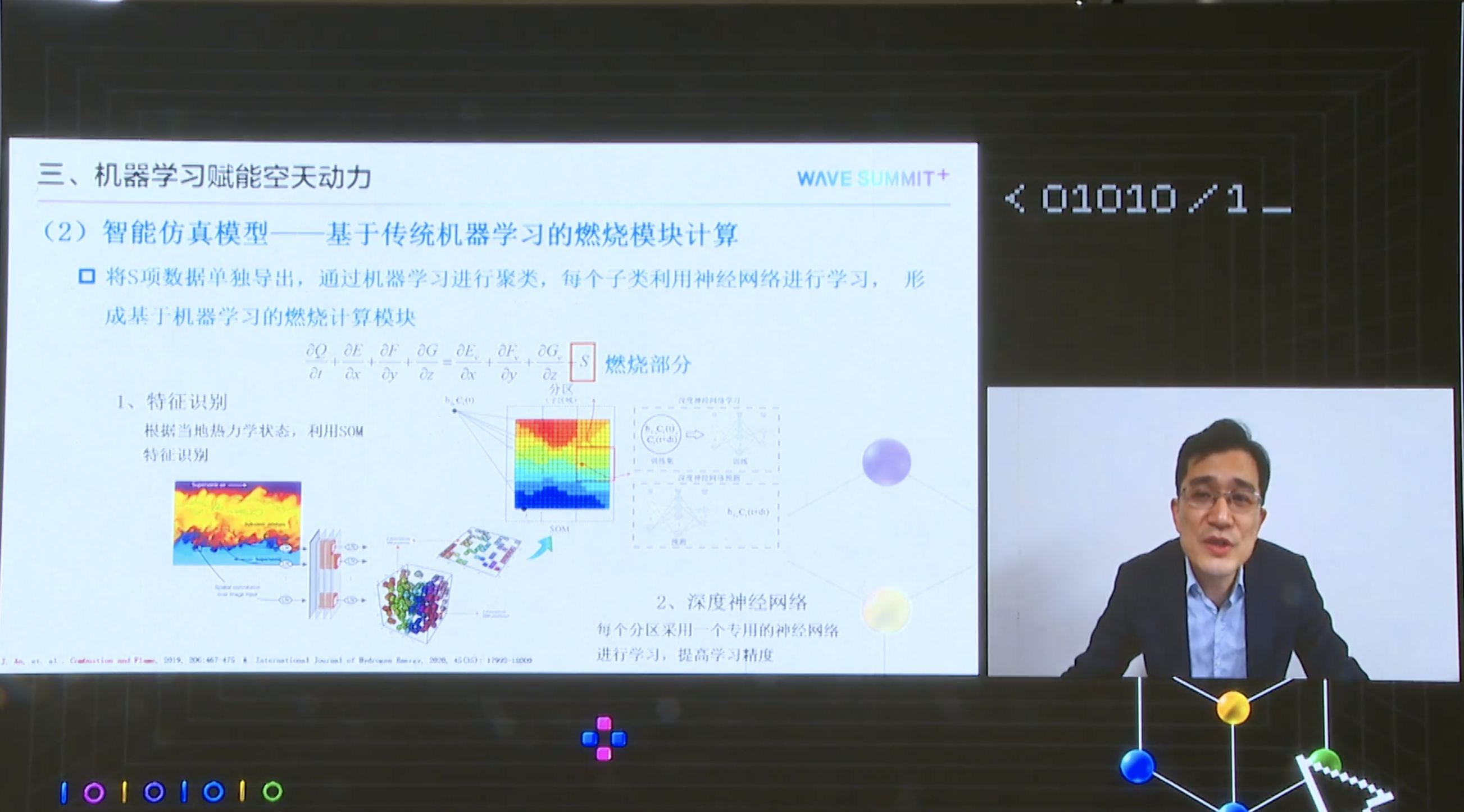
①第一個層級是,我們僅僅對模擬過程中求解的物理方程中計算量最大的項進行機器學習建模,也就是這個偏微分方程中的S項,主要反應的燃燒過程。
②第二個層級就是端到端,即將物理方程的求解結果,作為時間序列資料來進行學習,獲得一個大致可以預測時間序列的模型。
③然而,我們如果直接利用現有的機器學習方法進行時間序列學習,發現會存在很多非物理的預測結果,因而,發展了第三個層級,基於物理機器學習的方法。
第一個層級基於傳統學習方法,將方程中S項資料單獨匯出,通過機器學習進行聚類,每個子類利用神經網路進行學習,形成基於機器學習的燃燒計算模組。以發動機大渦模擬燃燒為例子,通過機器學習利用神經網路進行學習與傳統的動態自適應化學方法的計算精度是相當的,計算效率方面機器學習有5倍加速,可見機器學習方法還是比較有效的。
第二個層級,對於整個模擬過程進行端對端建模,首先通過改變臺階高度和位置引數,構建臺階非穩態數值模擬資料庫,輸入一百個樣本對,使用一個包含時間序列Unet結構進行訓練,完成訓練後,即可獲得基於機器學習的快速求解器,輸入臺階的引數即可獲得非穩態數值模擬結果。
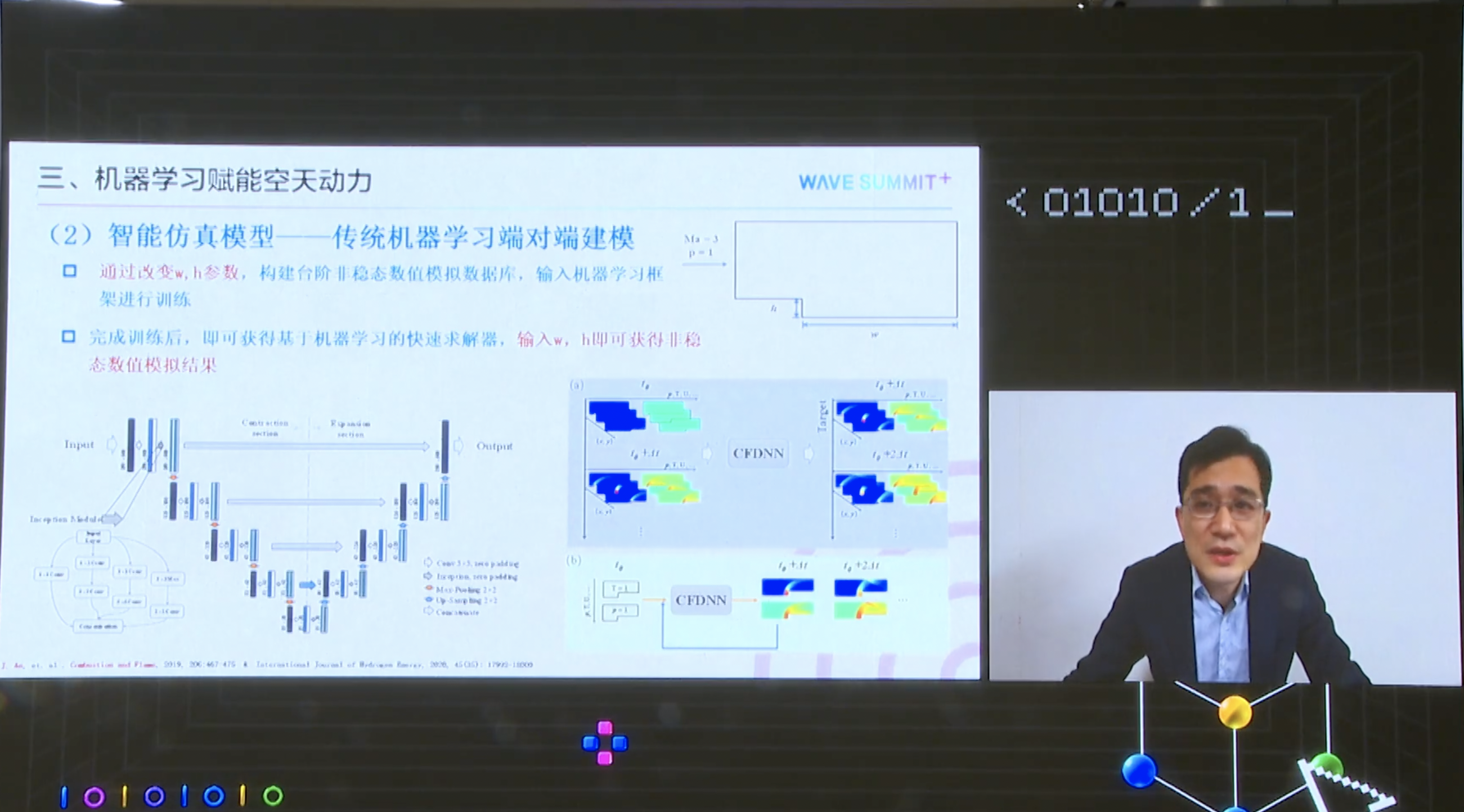
結果來看,我們可獲得非穩態的計算結果,對結果的預測時間大幅度提高。但是,我們可以發現其中存在非物理的現象。本質是因為Unet網路將其視為特徵,進行了影象的特徵識別與匹配。
上述結果表明直接通過機器學習方法求解物理問題存在非物理結果,2018年,Raissi等人引入了“物理資訊神經網路”(Physics-informed neural networks, PINN),將偏微分方程及其邊界條件放在損失函式中對預測值進行約束,使神經網路的預測值滿足偏微分方程組,通過這種方法,可以將預測值約束於物理方程,從而實現物理量的守恆。
物理機器學習的核心就在於損失函式的構建,考慮將損失函式定義為加權求和的L2範數方程和邊界條件的殘差。比如對於一維瞬態對流擴散方程,他的損失函式Lf中就包含了該方程,訓練過程中會保證Lf趨於0,即保證了物理方程。
利用該方法構建純流動互動式模型可以實現實時的數值模擬,獲得基於機器學習的求解器無需劃分網格,構型、邊界實時可變,可以實時改變形狀和位置,對於將來工程優化非常有利。
以前面提到的超音速臺階為例,構造包含控制方程的損失函式,超音速的控制方程的複雜度較上文複雜了很多,非線性也更強。
下面給出我們損失函式當中包含物理方程形式,右上角給出物理方程得到的結果,把傳統計算結果作為真值輸入使用。在網路結構訓練方面,輸入集合了邊界條件、網路座標以及故事留長,訓練使用過程當中用自動微分方法對損失函式高階函式進行求解,預測過程只需要物理機器學習網路,即可自行求解,獲得輸出的結果。
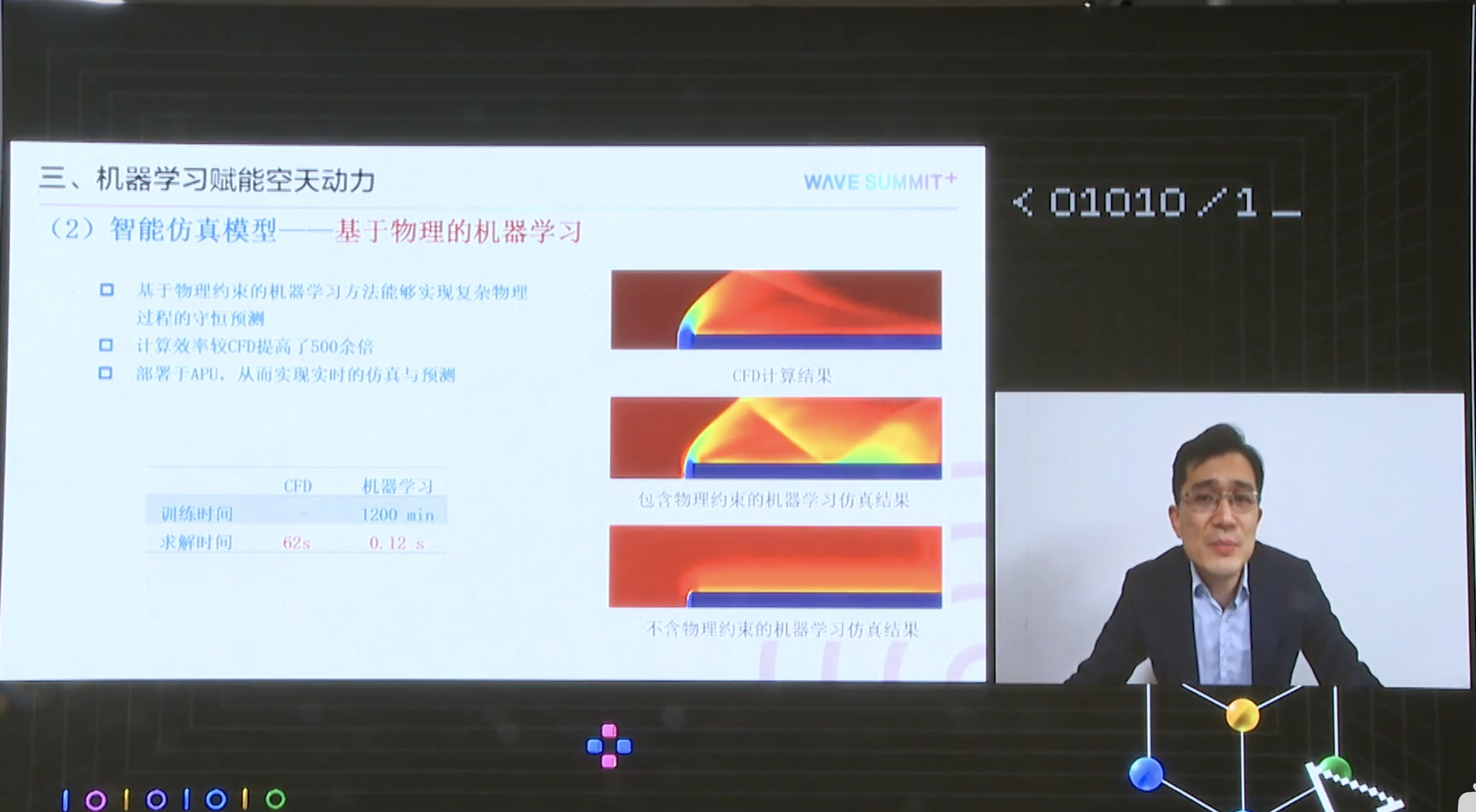
這裡給出了模型計算的結果(如下圖),最上為傳統數值模擬CFD的計算結果,作為真值,中間結果為包含物理約束的機器學習模擬結果,最下為不含物理約束的機器學習模擬結果。可以看到不含物理約束的機器學習模擬結果對於該問題,無法不斷自行迭代獲得正確的結果,而物理機器學習模擬結果和CFD計算結果基本一致,能夠實現複雜物理過程的守恆預測。同時,預測計算效率較CFD提高了500餘倍。如果我們將其部署於部署於APU,可實現實時的模擬與預測。
結果和展望
綜上所述,傳統的建模方法無法實現又快又好的模型建立,基於機器學習的模型將是推動數字轉型的核心,。但與此同時,如何構建工程可信的機器學習方法與體系又是我們需要解決的問題,我們相信人工智慧的方法在空天動力的應用將大有可為。
- 訓練資料有缺陷?TrustAI來幫你!
- 低程式碼平臺中的資料連線方式(上)
- 你一定愛讀的極簡資料平臺史,從資料倉庫、資料湖到湖倉一體
- 百度APP視訊播放中的解碼優化
- 如何輕鬆上手3D檢測應用實戰?飛槳產業實踐範例全流程詳解
- 四步做好 Code Review
- 百度智慧雲天工邊雲融合物聯網平臺,助力裝置高效上雲
- Redis 主從複製的原理及演進
- 面由心生,由臉觀心:基於AI的面部微表情分析技術解讀
- 大模型應用新正規化:統一特徵表示優化(UFO)
- 智慧大資料,看這本白皮書就夠了
- 效果提升28個點!基於領域預訓練和對比學習SimCSE的語義檢索
- 百度基於 Prometheus 的大規模線上業務監控實踐
- AI CFD:面向空天動力的科學機器學習新方法與新正規化
- 飛槳圖神經網路PGL助力國民級音樂App,創新迭代千億級推薦系統
- 全新快取元件,大幅加速雲上飛槳分散式訓練作業
- 知乎使用者畫像和實時資料的架構與實踐
- 全新快取元件,大幅加速雲上飛槳分散式訓練作業
- “千言”開源資料集專案全面升級:資料驅動AI技術進步
- 百度CTO王海峰:AI大生產平臺再升級 助力中國科技自立自強