深入淺出帶你走進 RocksDB

RocksDB 是基於 Google LevelDB 研發的高性能 Key-Value 持久化存儲引擎,以庫組件形式嵌入程序中,為大規模分佈式應用在 SSD 上運行提供優化。RocksDB 重點是提供工具支持,具體實現將交給上層應用。
正是這種高度可定製化能力,使得 RocksDB 可涵蓋包括工作負載等眾多場景的應用,今天我們將逐一為大家介紹:
"為什麼需要內存管理器? 為什麼不使用現有的內存管理器? RocksDB 究竟是如何實現的?"
01 為什麼需要內存管理器?
RocksDB 有很多核心場景需要分配內存的,包括但不限於 Memtable、 Cache、Iterator 等,高效優質的內存分配器就顯得尤為重要。一個優秀的通用內存分配器需要具備以下特性:
- 儘量避免內存碎片;併發分配性能好;
- 額外的空間損耗盡量少;
- 兼具通用性、兼容性、可移植性且易調試。
內存管理可以分為 3 個層次,自下而上分別是:
- 操作系統內核的內存管理;
- glibc 層使用系統調用維護的內存管理;
- 應用程序從 glibc 層動態分配內存後,根據應用程序本身的程序特性進行優化, 比如使用引用計數、std::shared_ptr、apache 等內存池方式的內存管理。
目前大部分服務端程序使用 glibc 提供的 malloc/free 系列函數,而 glibc 使用的 ptmalloc2 在性能上遠遠落後於 Google 的 Tcmalloc 和 Facebook 的 Jemalloc 。 後兩者只需使用 LD_PRELOAD 環境變量啟動程序即可,甚至並不需要重新編譯。
02 為什麼不使用現有內存管理器?
RocksDB 使用內存的場景集中在 Memtable、Cache、Iterator 等核心鏈路上,在保證高性能的同時,還需要實現對內存分配器內部控制(包括監控等)。
當前現有的內存分配器不具有主動上報內存監控細節,所以從長遠看,依舊需要自己實現 RocksDB 專有的內存管理器。內存管理器設計思路如下:
- 小內存的申請通過 Thread-cache 或者 Per-cpu cache,保證了 CPU 不會頻繁的 cache-miss;
- 若支持 MAP_HUGETLB,則會直接 mmap;
- 若大頁內存則直接從底層的分配器去申請。
03 RocksDB 是如何實現的?
如圖所示,RocksDB 的內存管理器是支持併發的,接下來讓我們一起從源碼入手,看看具體如何實現的。

Allocator
// Abstract interface for allocating memory in blocks. This memory is freed
// When the allocator object is destroyed. See the Arena class for more info.
class Allocator {
public:
virtual ~Allocator() {}
// 分配內存
virtual char* Allocate(size_t bytes) = 0;
// 對齊分配內存
virtual char* AllocateAligned(size_t bytes, size_t huge_page_size = 0,
Logger* logger = nullptr) = 0;
// 塊大小
virtual size_t BlockSize() const = 0;
};
Arena
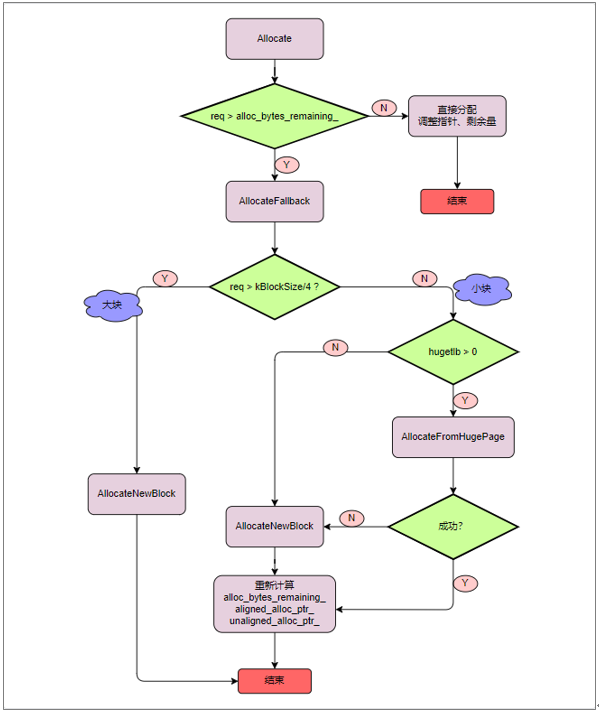
Arena 負責實現 RocksDB 的內存分配,我們從中可以看到其針對不同大小的內存分配請求,採取不同的分配策略,從而減少內存碎片。
class Arena : public Allocator {
static const size_t kInlineSize = 2048;
static const size_t kMinBlockSize; // 4K
static const size_t kMaxBlockSize; // 2G
private:
char inline_block_[kInlineSize] __attribute__((__aligned__(alignof(max_align_t))));
const size_t kBlockSize; // 每個 Block 的大小
using Blocks = std::vector<char*>;
Blocks blocks_; // 分配的新 Block 地址(不夠了就從新分配)
struct MmapInfo {
void* addr_;
size_t length_;
MmapInfo(void* addr, size_t length) : addr_(addr), length_(length) {}
};
std::vector<MmapInfo> huge_blocks_; // 大塊使用 mmap
size_t irregular_block_num = 0; // 不整齊的塊分配次數(塊大於 kBlockSize/4)
char* unaligned_alloc_ptr_ = nullptr; // 未對齊的一端指針(高地址開始)
char* aligned_alloc_ptr_ = nullptr; // 對齊一端指針(低地址開始)
size_t alloc_bytes_remaining_ = 0; // 內存剩餘
size_t blocks_memory_ = 0; // 已經分配的內存大小
#ifdef MAP_HUGETLB
size_t hugetlb_size_ = 0;
#endif // MAP_HUGETLB
char* AllocateFromHugePage(size_t bytes);
char* AllocateFallback(size_t bytes, bool aligned);
char* AllocateNewBlock(size_t block_bytes);
AllocTracker* tracker_;
}
針對 Allocate 和 AllocateAligned,我們採用對同一塊 Block 的兩端進行分配。AllocateAligned 從內存塊的低地址開始分配,Allocate 從高地址開始分配。分配流程圖如下:
ConcurrentArena
內存分配器不僅需要減少內存碎片,同樣需要保證併發分配的性能,那麼 RocksDB 是如何實現 ConcurrentArena 的呢?
從內存管理架構圖可以看出,RocksDB 維護了 CoreLocal 內存數組,每個線程從所在 CPU 對應的本地 Shard 上分配內存,若不足再去主內存 Arena 進行分配。我們從幾個核心類開始逐一介紹:
1、ConcurrentArena
class ConcurrentArena : public Allocator {
public:
// block_size and huge_page_size are the same as for Arena (and are
// in fact just passed to the constructor of arena_. The core-local
// shards compute their shard_block_size as a fraction of block_size
// that varies according to the hardware concurrency level.
explicit ConcurrentArena(size_t block_size = Arena::kMinBlockSize,
AllocTracker* tracker = nullptr,
size_t huge_page_size = 0);
char* Allocate(size_t bytes) override {
return AllocateImpl(bytes, false /*force_arena*/,
[this, bytes]() { return arena_.Allocate(bytes); });
}
private:
...
CoreLocalArray<Shard> shards_; // 維護了一個 CoreLocal 內存數組
Arena arena_; // 主內存
...
};
2、CoreLocalArray
// An array of core-local values. Ideally the value type, T, is cache aligned to
// prevent false sharing.
template <typename T>
class CoreLocalArray {
public:
...
// returns pointer to element for the specified core index. This can be used,
// e.g., for aggregation, or if the client caches core index.
T* AccessAtCore(size_t core_idx) const;
private:
std::unique_ptr<T[]> data_;
int size_shift_;
};
3、併發分配流程
template <typename Func>
char* AllocateImpl(size_t bytes, bool force_arena, const Func& func) {
size_t cpu;
// 1:大塊則直接從 Arena 上分配,需要加鎖
std::unique_lock<SpinMutex> arena_lock(arena_mutex_, std::defer_lock);
if (bytes > shard_block_size_ / 4 || force_arena ||
((cpu = tls_cpuid) == 0 &&
!shards_.AccessAtCore(0)->allocated_and_unused_.load(
std::memory_order_relaxed) &&
arena_lock.try_lock())) {
if (!arena_lock.owns_lock()) {
arena_lock.lock();
}
auto rv = func();
Fixup();
return rv;
}
// 2:挑選 CPU 對應的 Shard
Shard* s = shards_.AccessAtCore(cpu & (shards_.Size() - 1));
if (!s->mutex.try_lock()) {
s = Repick();
s->mutex.lock();
}
std::unique_lock<SpinMutex> lock(s->mutex, std::adopt_lock);
size_t avail = s->allocated_and_unused_.load(std::memory_order_relaxed);
// 2.1:若當前 Shard 可用內存不夠時,去 Arena 分配存入 Shard
if (avail < bytes) {
// reload
std::lock_guard<SpinMutex> reload_lock(arena_mutex_);
// If the arena's current block is within a factor of 2 of the right
// size, we adjust our request to avoid arena waste.
auto exact = arena_allocated_and_unused_.load(std::memory_order_relaxed);
assert(exact == arena_.AllocatedAndUnused());
if (exact >= bytes && arena_.IsInInlineBlock()) {
// If we haven't exhausted arena's inline block yet, allocate from arena
// directly. This ensures that we'll do the first few small allocations
// without allocating any blocks.
// In particular this prevents empty memtables from using
// disproportionately large amount of memory: a memtable allocates on
// the order of 1 KB of memory when created; we wouldn't want to
// allocate a full arena block (typically a few megabytes) for that,
// especially if there are thousands of empty memtables.
auto rv = func();
Fixup();
return rv;
}
avail = exact >= shard_block_size_ / 2 && exact < shard_block_size_ * 2
? exact
: shard_block_size_;
s->free_begin_ = arena_.AllocateAligned(avail);
Fixup();
}
s->allocated_and_unused_.store(avail - bytes, std::memory_order_relaxed);
// 3:根據是否對齊,判斷是從高地址/低地址分配
char* rv;
if ((bytes % sizeof(void*)) == 0) {
// aligned allocation from the beginning
rv = s->free_begin_;
s->free_begin_ += bytes;
} else {
// unaligned from the end
rv = s->free_begin_ + avail - bytes;
}
return rv;
}
總結
- 入參 Func 就是上面傳入的 Lambda 表達式:this, bytes { returnarena_.Allocate(bytes) ;
- 當請求內存塊較大時,直接從 Arena 分配且需要加鎖;否則直接從當前 CPU 對應的 Shard 分配;
- 若當前 Shard 可用內存不夠,需要從 Arena 再次請求;4、根據是否對齊,判斷從高/低地址分配。