2月23日直播回顧 | 基於 Intel 架構的車聯網智慧邊緣計算
點選藍字
關注我們,讓開發變得更有趣
內 容 來 源 | 社群直播內容
內 容 排 版 | 盧薔薇
# 基於 Intel 架構的車聯網智慧邊緣計算 #
主講人:雷鳴博士
Intel公司物聯網事業部
資深平臺架構師和資深5G技術專家
嘉賓:尹彥
英特爾物聯網集團汽車電子事業部
平臺方案架構師及功能安全技術專員
主題大綱
蜂窩車聯網市場的分析和預測
商用化時間表
車聯網相關的國際標準
面向車聯網的邊緣計算
Intel 開發了基於車聯網的運算裝置
ETC
面向車聯網的邊緣計算的晶片成品和 OpenVINO 的軟體工具包
直播大綱
蜂窩車聯網市場的分析和預測
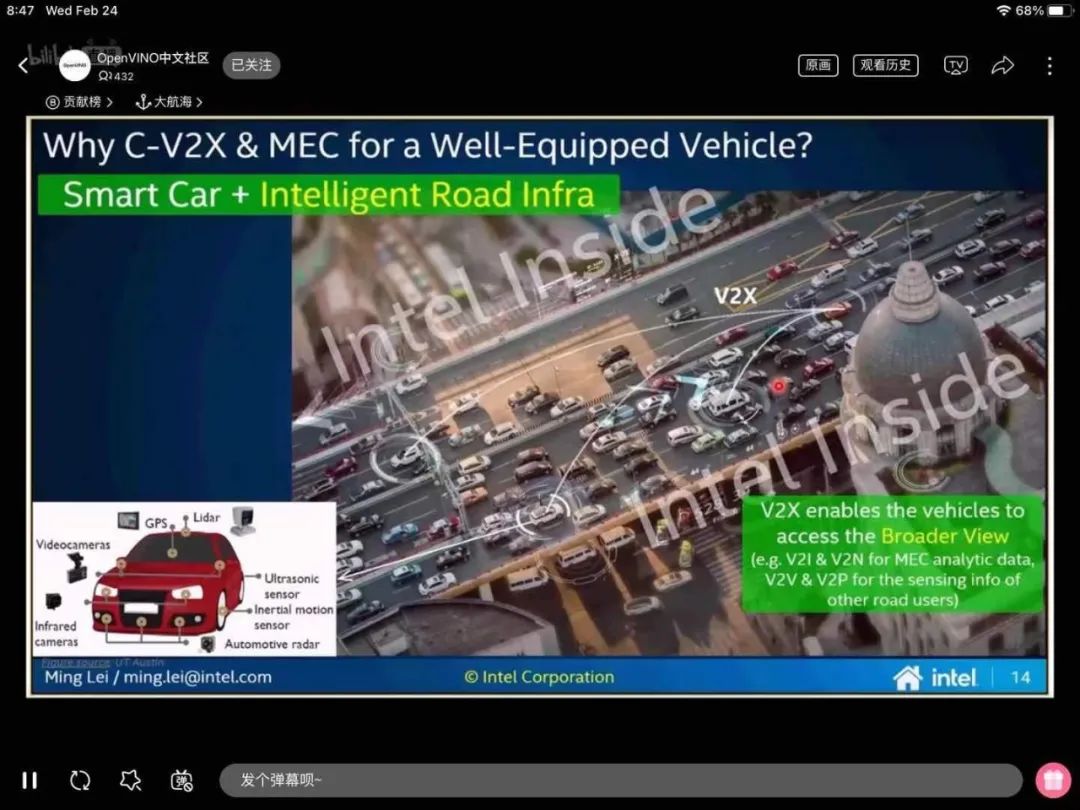
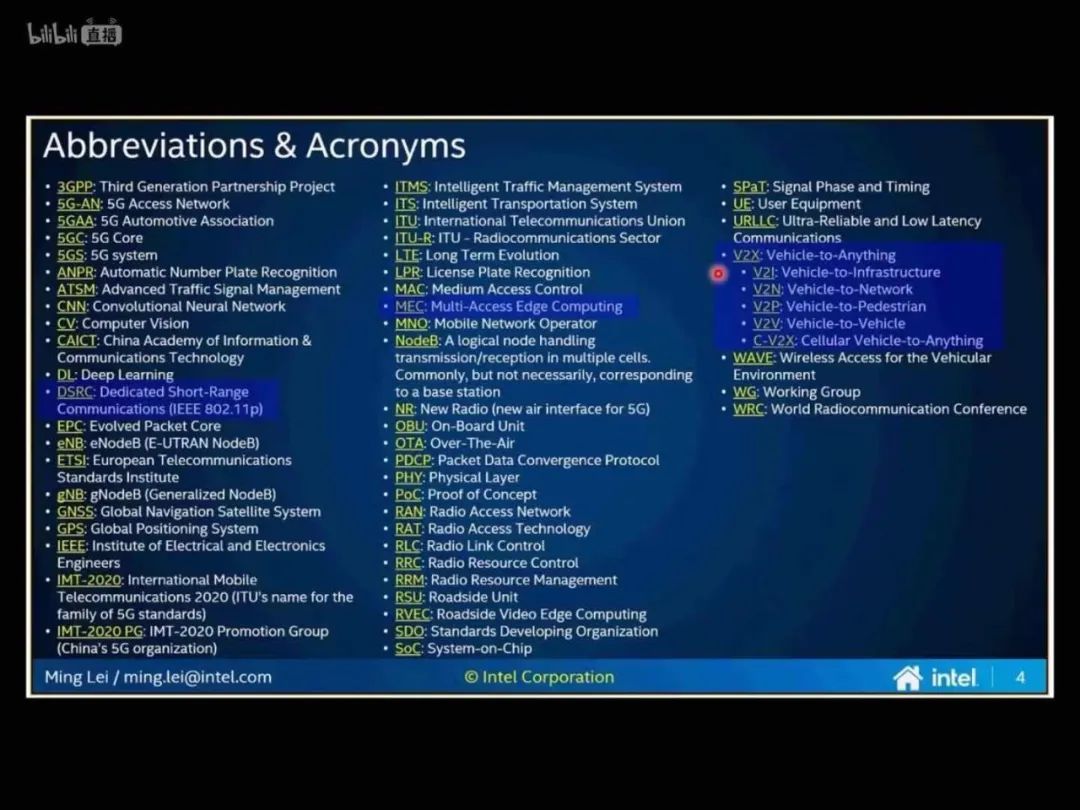
這個報告主要涉及了三種主要的技術,首先是無線通訊,邊緣計算,基於深度學習的計算機視覺,為了方便大家理解和對照把專業名詞的縮寫和全稱都羅列出來了。有兩個非常重要的術語,一個是 V2X(Vehicle-to-Anything),另一個是 MEC V2X 是車聯網的意思:包括兩種無線接入技術,如果是蜂窩接入技術的話被稱為 C-V2X,另一種接入技術是基於 DSRC 技術,其物理層和 MAC 層是基於IEEE 802.11p 的標準。
V2X 有很多應用,包括 V2I(Vehicle-to-Infrastructure),V2N(Vehicle-to-Network),V2P(Vehicle-to-Pedestrian) MEC最早在2013、2014在歐洲提出來的標準,到了2016年組織討論不應該只支援蜂窩網路,而應該支援多種接入的技術,包括WIFI、乙太網、光纖網路等,從而被改名為多接入邊緣計算。
商用化時間表
可分成兩類,一:交通效率;二:交通安全類。對於Intel而言,需要了解每一種用例之後的運算和負載的情況,是基於計算機視覺網路的處理還是基於毫米波雷達的處理,亦或是鐳射雷達的3D點雲的資訊處理。在瞭解了這些用例的運算、負載和需求之後,設計出符合場景和用例的硬體和軟體方案。
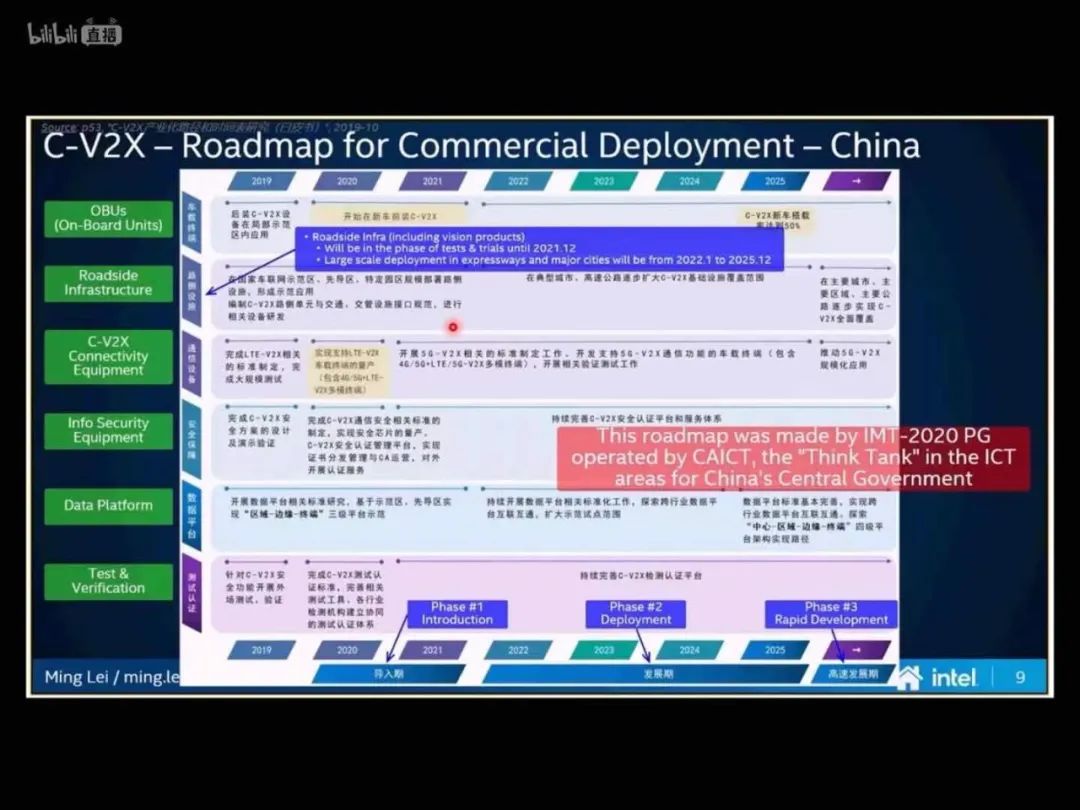
Deployment -china
2020-2021匯入期 車聯網裝置互操作性的一系列測試和實驗
20201-2025 展開基於 LTE-V2X 的部署,主要在典型城市和高速公路
2026年高速發展期 推動基於 5G C-V2X 的車聯網商用化 在縱軸方向,各種裝置和平臺都在往前推進,包括車載 OBU,基礎設施,車聯網通訊裝置、安全保障裝置、測試平臺和資料認證等。
車聯網的相關國際標準
到目前為止,車聯網有三個主要的體系或者說協議站:IEEE WAVE Protocol Architecture、ETSI ITS Protocol Architecture, 3GPP LTE-V2E based Protocol Architecture。基於Intel技術的MEC平臺對這些通訊技術是透明的,統統支援。
IEEE不是基於蜂窩通訊技術,所以稱之為 non-cellular V2X。
3GPP LTE-V2E based Protocol Architecture 基於蜂窩通訊技術標準化,所以稱之為cellular V2X,有明確的演進路線。
ETSI ITS Protocol Architecture的接入層與3GPP LTE-V2E based Protocol Architecture相同,所以也是 cellular V2X。
3GPP屬於蜂窩接入標準網的演進,主要有基於 LTE 空口和基於 NR 空口兩種。目前有三個標準可以使用:REL-14、REL-15 以及基於5G新空口的 REL-16。
面向車聯網的邊緣計算
1) 為什麼需要邊緣計算?
目前自動駕駛車輛可以實現,依賴於感測器,和自動駕駛最相關的就是攝像頭、鐳射雷達、毫米波雷達三種感測器,主要依靠視覺傳輸。但在實際的駕駛中由於建築物、車輛等阻擋,視覺傳輸不一定能保證行駛安全,在無遮擋的情況下感測器的感知範圍還是有限的。而如果實現車聯網的無線通訊有可能為車輛提供邊緣計算獲得的感知能力。
聰明的車+智慧的路---車路協同提升交通的效率和安全。
2) 場景用例 scenarios&use cases
概述 overview
安全裝置 safety service
3)邊緣架構 system architecture
4)介面 interfaces
5)裝置 equipment&devices(with intel inside)
6)PoCs
Intel 開發了基於車聯網的運算裝置
四款不同的 MEC 裝置,可以部署在不同場景之下,每一種型號都有兩個網路介面,其一支援 vPro 技術,遠端管理和服務介面,減少運營和維護成本;另一個作為資料介面。
PRODUCTS BASED ON AI
Products based on IA -RVEC for ITMS
ETC-Possible New Feature for C-V2X
5GAA,一些高校用 LTE 和5G的結合
ETC
ETC 系統裝置基於AI視覺應用,Intel 提供了各種晶片產品,從端側到雲和邊緣都有不同的產品,覆蓋了從通用計算到專用計算。
面向車聯網的邊緣計算的晶片成品和 OpenVINO 的軟體工具包
OPENVINO 軟體開發工具有兩大特點,第一支援傳統視覺影象處理,包括光流計算、影象增強等,不依賴於神經網路和深度學習;第二,基於深度學習的計算機視覺處理,依賴於神經網路進行AI計算。
基於深度學習的計算機視覺推理主要分成三步進行:
客戶一般會使用常用的軟體框架來進行模型的建立和訓練;然後model optimizer進行模型優化,去除冗餘,形成中間表示檔案,神經網路模型被inference engine 呼叫,生成對應不同Intel 晶片平臺的plug in;轉換好的的模型會被下載到不同Intel晶片平臺進行部署,部署後就可以在晶片平臺上進行推理的運算。
Q&A

車聯網或者說AI領域,安全問題該如何保證,請問老師 OpenVINO 框架中有安全方面的內容嗎?如果沒有以後會加入嗎?
車聯網在實時通訊上能支援5G麼?延時和幀率是多少?Intel採用的是什麼晶片呢?
針對巨量的感測器資料處理,Intel 在軟硬體層面做了那些工作,有沒有計劃推出專用的軟硬體產品?
想問一下雖然說邊緣計算和雲端計算是不可分割的,那麼邊緣所需要承擔的計算任務大概有哪些呢?好處有哪些?
車聯網智慧邊緣計算領域具有哪幾個流派?基於 Intel 架構的主要優點和規格大約是什麼樣的?謝謝。
ARM 架構系統、英偉達架構、Intel。Intel 的生態比較廣,比較成熟。因為很多裝置需要部署在惡劣自然環境,為了減少人工成本和時間,Intel 系統可以進行遠端維護和管理。x86平臺支援各種埠,綜合性能更為優越,為車輛網的各種應用提供充分的支援。
--END--
不要錯過(點選藍字檢視)⬇️
➡️ 「OpenVINO 中文社群」2020全年回顧
-
你也許想了解(點選藍字檢視)⬇️
➡️ NexCOBOT 利用英特爾®視覺加速器設計產品為工業 4.0 提供 AI 機器人
➡️ OpenVINO™ 工具套件應用案例之停車場監控系統
➡️ OpenVINO 讓數字菜單板具有更多樂趣
➡️ 多攝像頭社交距離檢測用例
➡️ Windows 下編譯 OpenVINO
➡️ ESH for OpenVINO Community 概覽
➡️ OpenVINO human pose estimation 例程執行
➡️ 基於 OpenVINO Python SDK 環境配置與執行
-
你也許想知道(點選藍字檢視)⬇️


○ 點選 “ 在看 ”,讓更多人看見
點選閱讀原文跳轉觀看回放視訊!
本文分享自微信公眾號 - OpenVINO 中文社群(openvinodev)。
如有侵權,請聯絡 [email protected] 刪除。
本文參與“OSC源創計劃”,歡迎正在閱讀的你也加入,一起分享。
- 經典多目標跟蹤演算法DeepSORT的基本原理和實現
- 以 AI 作畫,祝她節日快樂;簡單三步,OpenVINO™ 助你輕鬆體驗 AIGC
- 即刻報名!飛槳黑客馬拉松第四期如約而至,等你挑戰
- OpenVINO課程回顧之上集:基礎課程 | 解鎖更多使用技巧
- 正式開啟報名!2023全球女性開發者峰會
- 大賽報名|來自飛槳黑客鬆的邀請函
- 活動回顧 | 2021微軟X英特爾黑客鬆大賽精彩回顧 01
- 賽事推薦 | 中文臨床醫學文字分詞與命名實體挑戰賽開啟報名
- 活動預告 | 使用 OpenVINO 部署加速飛漿預訓練模型
- OpenVINO 中文社群一週年特別活動:助力開發者,共建社群2.0
- 2月23日直播回顧 | 基於 Intel 架構的車聯網智慧邊緣計算
- 早餐 | 第二十八期 · Graph Transformation(一)
- 明晚20:30-21:30直播獎品
- 2月24日直播預告 | 基於Intel架構的車聯網智慧邊緣計算
- OpenVINO 學習資源
- ESH OpenVINO 相關資源連結
- 早餐|第二十二期 · 轉換Tensorflow 模型
- 早餐|第二十一期 · Model Optimizer 引數介紹 (三)
- openvinotoolkit-prc的相關工具包介紹(中文版)
- 答疑解惑|你們想知道的「社群提問三方式」來了!